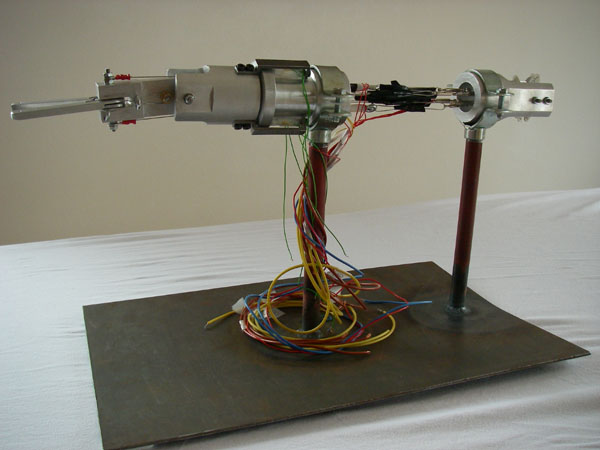
In this fist project at the University of Applied Science we tried to realize a force feedback on the model of the surgical robot.
t
In this fist project at the University of Applied Science we tried to realize a force feedback on the model of the surgical robot.
t