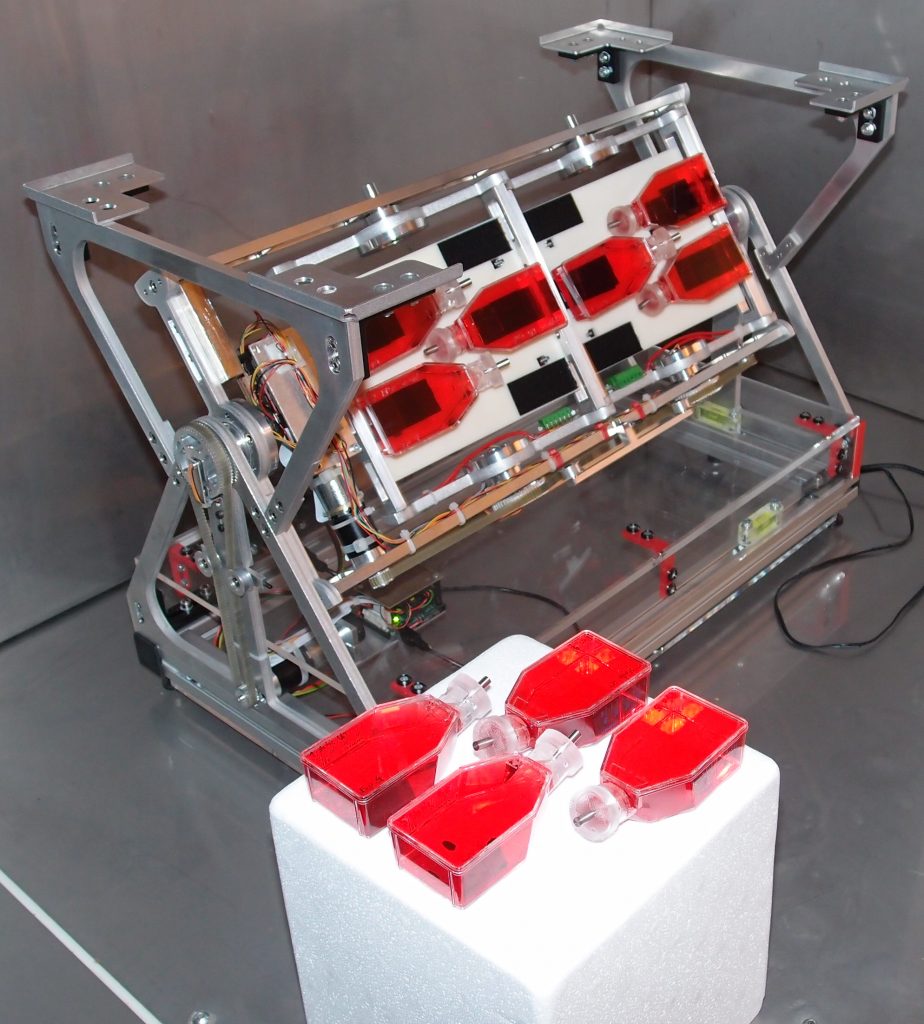
Exposure to acute and prolonged microgravity triggers numerous physiological adaptations. To date, the underlying molecular mechanisms are not well understood, and several pathways have been proposed. Among other candidates, specific ion channels are hypothesized to be gravity dependent, but it has not been possible to conclusively demonstrate gravity dependency of specific protein entities. Therefore, we developed a miniaturized two-electrode voltage clamp (TEVC) that allowed electrophysiological experiments on Xenopus laevis oocytes using the GraviTower Bremen Prototype (GTB-Pro). The GTP-Pro is capable of flying experiments on a vertical parabolic trajectory, providing microgravity for a few seconds. As an interesting first candidate, we examined whether the nonselective mechanosensitive ion channel PIEZO1 is gravity dependent. The results showed no difference between PIEZO1-overexpressing and control oocytes under acute microgravity conditions.
Continue reading