Author Archives: Simon
CEMIOS, REXUS 20
Random Positioning Machines (RPMs)

Random Positioning Machines (RPMs) are used as a ground-based model to simulate microgravity (or weightlessness). Thereby, the biological samples are continuously rotated about two axes. The simulation of microgravity requires that the RPM’s rotation is faster than the biological process under study, but not so fast that undesired side effects appear. We have built several RPM in various sizes and with various features.
Continue readingMyoblast Differentiation under Simulated Microgravity: Long Term Cell Culture on Random Positioning Machines
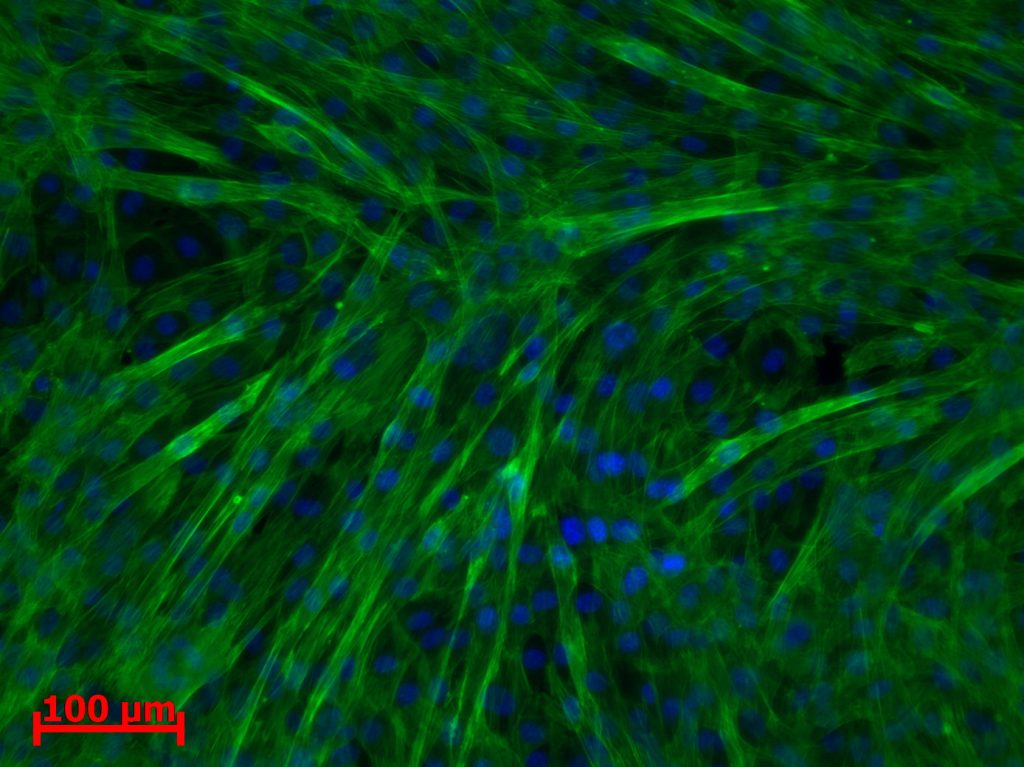
Muscle atrophy is of great medical concern, not only for astronauts in space but also for immobilized patients or elderly people on earth. Random Positioning Machines (RPM) are ground based devices frequently used to expose cells to simulated microgravity. The RPM consists of two gimbal mounted frames which rotate constantly to average the earth gravity vector over time to zero. Many studies on myoblasts have been carried out to study muscle development but only a few data are available concerning myoblast differentiation under simulated microgravity. The goal of this project was to improve the means of cell cultivation on the RPM and to study myoblast differentiation under simulated microgravity.
Continue readingHigh-Temperature Tribometer
The Federal Institute for Material Science and Technology (EMPA) uses – at its branch in Thun – a tribometer to determine the specific abrasion properties of two samples rubbing on each other. Our task was to expand and modernize the tribometer, so friction force and the normal force can be measured in high temperature experiments. In addition we integrate an automatic control for the temperature and the rotation speed of the samples.
AFReCoS: Automated Fish Counting
The aquatic research institute Eawag conducted, in collaboration with Energie Wasser Luzern (EWL), an evaluation of the fish ladder at the hydroelectric plant Mühleplatz in Lucerne. Thereby, video footage of fishes passing by an observation window was captured and manually evaluated, which was very labor intensive. We searched for a software approach to automatically analyze the video footage. The task was to detect the fishes’ species, its swimming direction and count the number of passes in front of the camera.
Force Measurement on a Robot Model

In this fist project at the University of Applied Science we tried to realize a force feedback on the model of the surgical robot.
Scratcher for Thin Film Solar Cells
Scratcher device which was designed for the Group for Thin Film Physics at the ETH Zürich. The group was developing a novel, flexible solar cells. The solar cells were made of thin films of Mo, CIGS (Cu, In, Ga, Se2) and ZnO. For research purposes these films were manufactured in vacuum chambers on glass plates. The scratcher was meant to structure the film on the glass plate into individual cells.


Vacuum Manipulator
Manipulators for instruments used under high vacuum must be strictly air tight. This manipulator allows to rotate and shift an instrument placed in a high-vacuum chamber. Manipulation was transmitted via a magnetic coupling.


UV-Laser Manipulator

Precision manipulator to position (rotated and shift) two mirrors for UV-laser applications.